En el capítulo II de las simulaciones, se cambió el generar expresiones algebraicas por algoritmos completos en forma aleatoria, fue un buen avance, sin embargo, estos algoritmos solo se podían mutar en forma leve porque al tratar de combinar dos algoritmos (emulando la reproducción), los cambios fueron tan drásticos que los hijos eran casi siempre peores que los padres en adaptación.
El clásico algoritmo de ejecución secuencial y que solo salta a otra instrucción dada una condición, lo considero limitado para la vida artificial.
En una propuesta anterior, al cual llamé un enfoque radicalmente distinto, se planteó el caso de eliminar la instrucción IF (si condicional) de la programación genética y en el que la vida se constituía de unidades mínimas atómicas que compiten entre sí para lograr tiempo de ejecución, las condiciones ambientales las da las emociones.
Es tiempo de retomar la idea y plantearla en una simulación con la siguiente arquitectura:
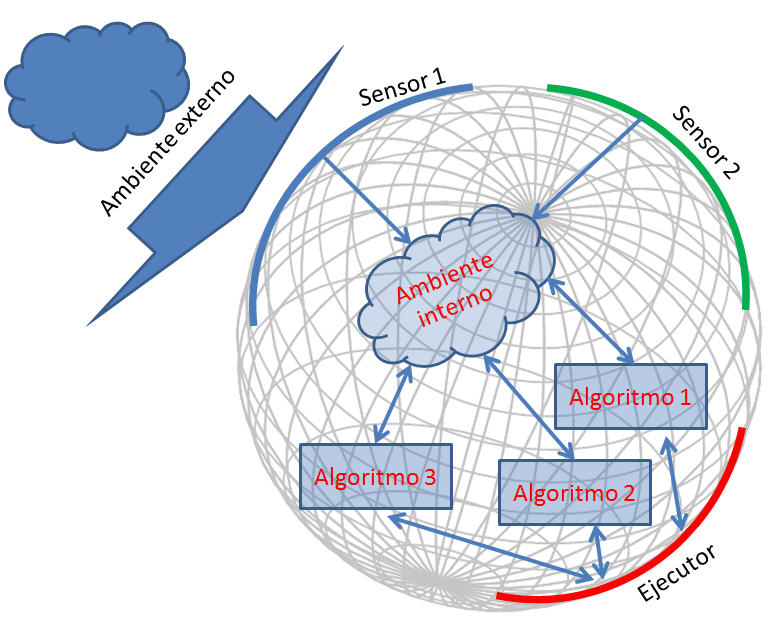
1. Hay un sólido (conceptual) que separa el mundo externo del mundo interno. En la figura se muestra como si fuese una esfera.
2. Dentro de ese sólido hay un ambiente interno.
3. Dentro de ese sólido hay unidades algorítmicas que solo pueden mutar al reproducirse, no se combinan con otras. No hay reproducción sexual. En la figura se muestran como Algoritmo 1, Algoritmo 2, Algoritmo 3.
4. Esas unidades algorítmicas compiten por tiempo de ejecución dentro del sólido conceptual.
5. Es un comportamiento emergente el reproducirse o competir por más tiempo de ejecución.
6. La ejecución de estos algoritmos modifica el ambiente interno de tal manera que el ambiente interno se vuelve hostil para los que lo están ejecutando por lo que comienzan a perder relevancia y dejan el espacio a otros algoritmos que aprovechan las buenas nuevas condiciones.
7. Ejecutar es vivir, mantenerse en estado suspendido acarrea la desaparición. Con eso se ahorra todo el problema del manejo de recursos.
8. Los sensores son la forma de comunicación entre el mundo externo y el mundo interno. Los sensores al reaccionar ante el mundo externo comunican información modificando el ambiente interno.
9. Los ejecutores son los que hacen que el sólido reaccione ante el mundo externo, estos ejecutores son controlados por las unidades algorítmicas.
El juego es bastante complejo porque los ejecutores reaccionan dependiendo de las unidades algorítmicas (estas compiten por ejecutar), el ejecutor mueve el sólido a diferentes ambientes externos que hacen que reaccionen los sensores, los cuales modifican el ambiente interno que afecta a las unidades algorítmicas.